Artificial systems operation - problems in safety and reliability
Multiconference CSCC, MCP, MCME, Crete, Monday, July 9, 2001
The transportation systems consist in general from interaction of three main components:
* the transportation tools (vehicles, pipes, wires etc.),
* the transportation control (supervising systems),
* the interaction with human factor.
It is not possible to discuss all the main aspects concerning the problems of system operation reliability and safety in one presentation. Therefore I shall concentrate here on some of them, which I consider as top important and which were in the focus of interest of our research group in recent about 10 years.
These topics, which I would like to mention here, are:
* the problem of interface operation reliability,
* the problem of artificial system - human subject interaction reliability and
* the problem of tools and methods for system reliability and safety improvement.
1. Problems, concerning the reliability and safety of interface operation
Almost all the contemporary complex systems are of the heterogeneous nature.
Their network structure consists usually of several mutually cooperating sub-networks, often of multi-modal character.
As basic unit for system construction various functional blocks FBm are used.
The functional blocks can be considered as such construction units, which are technologically compact and can produce some useful system functions Fm.
The heterogeneous systems are constructed from M functional blocks FBm, m = 1,…M of various types and properties.
The functional ability of whole heterogeneous system depends strongly not only on reliability of all the individual FBm ´s but also on reliability of their mutual interactions.
The reliable and safe operation of any real system requires the reliable and safe operation of the respective information subsystem, because no system can operate without information processing.
We can say that the quality of any system operation depends strongly on the quality of operation of its information subsystem.
However, the very well operating information subsystem cannot ensure the well operation of the respective system as the whole, especially if the particular functional blocks FBm, realizing the partial system functions Fm are operating only with unsatisfactory reliability and safety.
By system reliability H we shall understand the probability, that all the significant functions F of the system S under consideration will not exceed out of the respective region of acceptability RA for all the considered values of independent variables P.
Suppose that the operation of some system is represented by the set F of its K partial system functions
F = {Fk}K,…....................………………(1),
where k = 1,…K and
Fk = Fk(X,P)
X = {xn}N , n = 1,…N are the system parameters and
P = {pj}J, j = 1,…J are the independent variables.
The independent variables P can be of quite various physical natures, but the time, i.e. p = t belongs to the most important among them.
The values of system parameters X are influenced by various independent variables, namely by time t and the respective vector X follows in the N-dimensional parameter space the trajectory Y(t), often called as the life-curve.
If this trajectory is inside certain region of acceptability RA, the system operates well, i.e.
F - F* L DF, …………….………………(2)
where F* are the desired values of the respective system functions and
DF is the allowed system function deviations.
By system safety SF we shall understand the probability, that the realization of the respective system function does not have negative influence on realization of other functions of the system under consideration, or in general on other systems (including the human beings) existing in the environment.
Similar as the energy, also information has to be considered both from the qualitative and quantitative aspect.
Certain data can be therefore interpreted by two different users as quite various information.
The information efficiency of any information procedure can be defined as the ratio of the amount of information which the transmitting subject has included in the respective information procedure to the amount of information which the receiving subject has received and used. Such definition is however suitable before all for information procedures of the transmission nature. For information procedures of another type (e.g. of the storing, coding and decoding nature) it has to be modified, at least by respecting the qualitative character of information.
All the input data, output data and also the internal information of the system can be interpreted in different alphabets and gramatics. In the course of their interactions they must therefore be translated. This procedure can be realized with various efficiency and reliability.
By the term of information processing reliability we understand here the probability that certain information procedure will be realized without faults.
This concerns not only the translations, but also all other kinds of information procedures. For evaluation and subsequent improvement of their reliability and efficiency the methods of the general theory of system reliability can be applied. Here especially some modern approaches, like the prediction diagnostics appears to be very attractive.
For the purpose of this presentation, the further assumption can be made (this is very often fulfilled with high accuracy):
a] the structure St of the system does not change with independent variables;
b] all the system parameters xi can be expressed by real numbers;
c] from all possible independent variables pj the time pj = t is considered as most important, because for any real system it acts as the only absolute uninfluenced independent variable.
In this lecture our attention will be focused to special kind of artificial systems - to technical systems. These are of various kinds,
* production,
* safety,
* energetic,
* transportation,
* information etc.
The artificial information systems are of special importance to our study, especially for their significance in transportation applications.
Let therefore artificial information systems now be considered.
These are contemporary characteristic of their still increasing complexity and importance. They realize various complex and complicated system functions, very often of
very high economic,
business,
social (political) and
strategic value.
Therefore, the operation of such artificial information system must be performed with high level of functional effectivity and reliability.
The structure St of mutual interaction among FBs can be fixed or can develop in the course of the system operation.
Functional blocks FB acting in real systems can be of various kinds in general, however for information systems the following kinds can be considered as typical:
· receptors,
· processors,
· associators,
· memory,
· effectors.
Among the all these main kinds of functional blocks various feed-forward and feed-back interactions exist. Many of these basic functional blocks can in a real information system operate in parallel and so these interactions exist also among the individual functional blocks.
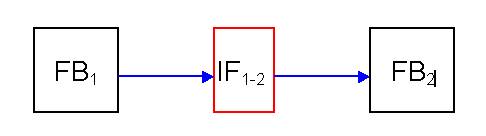
Fig. 1: Interface (synapse) acting between two interacting functional blocks for the case of one-directional interaction.
This is the case of one directional interface.
Suppose the interaction between two functional blocks FBj and FBk arranged so that the block FBj supplies the output information, which is transmitted to the block FBk. Such procedure is performed by the use of two interaction supporting media, the interface If and the transmission path Tp. The output information from the functional block FBj is formed on the base of some alphabet ABj and with some grammar Gj. However, the functional block FBk is able to understand the received information, only if it is written in alphabet ABk and grammar Gk.
If therefore the full understanding of the message transmitted from the functional block FBj to the functional block FBk is to be ensured, somewhere along the transmission path between FBj and FBk, the translation of the message written in ABj and Gj into message written in ABk and Gk has to be realized.
The function of IF has different character, if it has to ensure the necessary translation also in the case when the interaction between both interacting blocks is bi-directional (see Fig. 2).

Fig. 2: Interface acting between two interacting functional blocks for the case of bi-directional interaction.

Fig. 3: Interface acting between two interacting functional blocks for the case if interface (synapse) is split in two parts.
The capability of certain signal path in hybrid system to realize the requested information translation is called the translation-ability.
This means that among all the considered interacting functional blocks the respective signal transmission paths must exist, in which the requested interfaces ensured the necessary information translations. This translation must of course be realized with appropriate accuracy, reliability and in requested time. Formulation of requirements on translation-ability (and inclusive on the respective interface function) belongs to one of most important problems in heterogeneous system design. In complicated systems also the mutual synchronization of function of all the interacting interfaces needs a special attention.
The aspect of translation reliability requires before all that we need to determine: * The maximal acceptable error in translation function of the interface under consideration,
* The instant in which the particular translation has to be realized in the course of the concert of all the mutual interacting interfaces activity,
* The maximal acceptable delay between acceptance of the information submitted for translation into the particular interface and its transmitting in proper translated form into the respective interacting functional block,
* The difference among the alphabets and grammars of the respective translated information.
As concerns the first mentioned need, the analysis of the system function sensitivity to the particular translation error has to be taken into account. It is evident, that in complicated hybrid system the significance of correct and accurate translation in certain its parts can be higher.
As concerns the second mentioned need, here one has to take into account that not all the translations realized in the system under consideration are often realized subsequently. Some partial translations can start in the same instant, especially if the parallel information processing is practiced in the particular case. All the partial information translation procedures have therefore be done in certain specific schedule, forming the whole "translation concert", which optimal composition requires a very deep analysis.
As concerns the third mentioned need, one has to take into account that all the respective partial information translation are realized in real time and that they require some time. If in the " translation concert" under consideration requires subsequent translation processing, the condition that in proper instants all the input information have to be at disposal needs to be considered.
As concerns the fourth mentioned need, we have to take into account that the length of the partial information translation and its sensitivity to translation errors is in general proportional to the difference between the input and output alphabet and grammar. Also the fuzziness of the input information has to be taken into account.
The aspect of translation safety requires before all that we need to determine:
* The sensitivity of other system function of the system under consideration on the particular translation procedure,
* The effect of the particular information translation and its further dissemination on other systems (including the human beings) existing in the environment,
* The effect of distortion of the particular information translation on other systems (including the human beings) existing in the environment.
As concerns the first mentioned need, not all from the whole set of information translation realized in the course of certain system operation have the same influence to other signal and information processing in general.
Some of them influence the other translations more, some less. The analysis of the values of sensitivity SFktr i , where Fk is the system function under consideration and Tri is the particular translation is therefore of great importance.
The knowledge of the values SFktr i allows to determine, which translations have to be done with much more care.
For the purpose of such an analysis a good part of the apparatus of the general sensitivity theory can be used, however some modifications will be suitable.
Similar approach can be used when solving the problem of maximal acceptable level of distortion of particular information translation with respect to the correct activity of other systems (or humans) in the environment.
The aspect of translation security requires before all that we need to determine:
* The maximal acceptable level of parasitic interactions among all the non-functionally interacting interfaces,
* The time-dependence of requirements on translation security and the course of their subsequent decrease
Like almost all the information procedures, also the translations cannot be realized absolutely perfect.
In any case we must accept the possibility that certain amount of errors and mistakes appear, which diminish the information content of the translated message and lower the probability that the receiving functional block will understand well the content of message.
The faults appearing in the procedure of translation can be classified according to their significance for lowering this probability.
Before we try to start with classification of faults, we must take into account that there exist certain thresholds, below which the influence of translation faults can be neglected.
The first mentioned need concerns the problem which part of information and energy can be spread around the interface realizing particular translation so that the security of the respective information procedure does not decrease under certain specified limit.
As concerns the second need, we have to take into account, that the requirements on translation security do not remain still the same during the history of particular system activity.
Usually, they decrease in the course of time. Some secret information can be opened for broader distribution after some time.
This is due the ability of some interfaces to restore and reconstruct in certain manner the content of the translated information. Also some receiving functional blocks have the ability to accept and understand well certain information even if it is distorted. The dependence of the probability of well understanding the translated information on the scale and frequency of faults is therefore significantly nonlinear (see Fig.4).
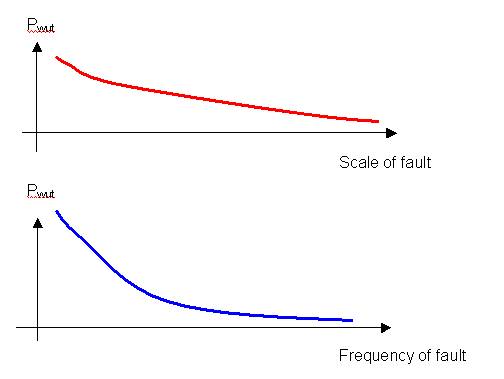
Fig. 4: Example of the non-linearity of dependence between the probability of well understanding the translation information Pwut and the scale and frequency of faults. The actual shape of both these non-linearities depends on the reliability of the particular translation procedure.
Let propose to distinguish following main categories of faults which have the influence on probability of understanding to translated information:
* Negligible faults, which do not have any observable influence on the probability of understanding the translated information,
* Slight faults, which have observable but neglect-able influence on the probability of understanding the translated information,
* Serious faults, which have non neglect-able influence on the probability of understanding the translated information,
* Fatal faults, which causes the incapability of information translation at all.
More over, some information appearing at outputs certain functional blocks can be of fuzzy nature and its subsequent translation results therefore again in fuzzy statement.
For the safe procedure of information transmission, the improvement of translation reliability and safety is of great importance.
In general, there are the following main approaches how to improve the translation reliability: * To realize the respective translation in more parallel paths comparing the results of particular translations and taking as correct that, which appears in majority.
* To insert in the respective translation some hidden implicit code for translation reliability testing. This code cannot have, of course, any influence on the content of translated information.
* To analyze the acceptable limits of possible information distortion in the course of translation and to predict the probability by which the particular translation approached these limits.
The extension of the last approach can be based on the basis of predictive diagnostics, where one estimates the subsequently appearing distortions in the course of the translation procedure and corrects respectively its further steps. This is of special importance in the case of interactions in heterogeneous systems where the technical functional blocks interact with human subjects. No of these approaches is optimal, in general. They are therefore often combined. Doing this one has of course to take into account the requirements on translation speed, limits on translation cost, energy requirements etc. For further research there is a very vast area opening here.
2. Problems of artificial system - human subject interaction reliability
The problem of interaction reliability between artificial system and human being (operator, user), though extremely important, is still not solved satisfactorily, even the control of dominant part of complex and complicated systems is now realized by computer or at least by computer assistance.
The human operator, who has to interact with powerful, complicated and often also efficient artificial system (such as transport system, aircraft, express trains, large trucks, extensive power stations, security and defense systems etc.), is imposed to requirements on fast and correct reactions on very variable actual situations. Such exposition exists usually for considerably long time of his/her service.
The resulting high load of such operator´s brain and nervous system results necessarily to decrease of his/her vigilance and to degradation of his/her attention.
These demands on human operator ability are often jointed with influence of some internal and/or external factors. These are e.g.
* the long length of service,
* psychical isolation in the course of service,
* operators actual mental and physical state,
* climatic conditions,
* quality of environment in the particular cock-pit or control room,
* monotony of the scene or image, which operator has to observe etc.
The endeavor of our investigations is at present the diagnosis of attention decrease and of the related reduction of the reaction speed to unexpected emerging situation.
Such attention degradation can also result in real micro-sleep.
Both this states of operators brain,
· the long lasting attention decrease and
· the short lasting micro-sleep,
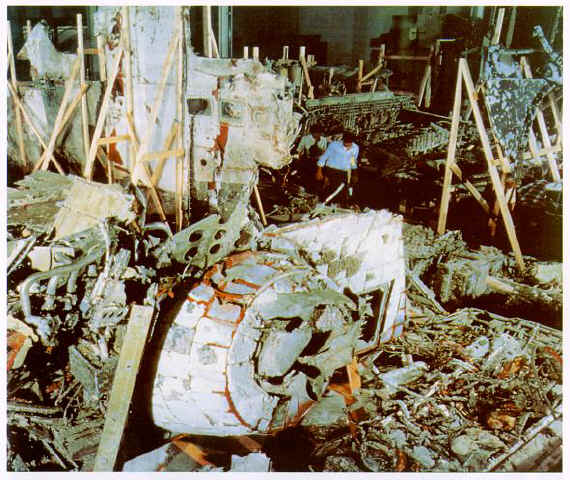
can be extremely dangerous and can result not only in huge material and financial damages, but also to losses of human lives.
The requirements on a human operator of an artificial system can be concentrated in the following main categories:
a) requirements on attention level and continuity,
b) requirements on the speed of operator reaction,
c) requirements on the correctness of operator decisions.
Within all three above-mentioned categories of the reliability of human operator - technical system interaction a correlation naturally exists.
A straightforward correlation exists between attention level and speed of reaction. Operators commanding at high level of attention usually also possess very fast reactions.
On the other hand cases can appear, when fast, almost impulsive reaction may not be accompanied by very high level of the operator's concentration and attention.
Some people can react fast also when their attention is shared by different objects (they have very fast reflexes).
In addition, a high level of attention in the majority of cases leads to a very high probability of correct decisions and vice versa - if somebody is not concentrating enough, there is a rather low probability that his/her decision will be correct.
On the other hand, in the case of very fast reactions accompanied by a very low level of a human operator's attention, the probability of an incorrect decision can increase significantly. This is typical for a so-called surprise reaction, from which a transition to a panic reaction can sometimes be observed.
A drop in the attention level of a particular human operator can be caused by various external or internal reasons; some of them have a general character; the intensity of others depends significantly on the operator's individuality.
Among the general conditions causing the decrease of attention is: - Extreme length of a particular operator's service without breaks,
- Operator's physical and mental exhaustion, - Monotonous scene which the operator has to observe for a long time,
- Extreme temperature in which the operator has to serve (too high or too low),
- Extreme humidity in which the operator has to serve (too high or too low),
- Extreme air pressure,
- Air smell, dust density etc.
- Matters leading the operator to concentrate on problems other than from his/her main service.
The level of a operator's attention can be measured by the use of some real figure of merit LAT, expressed by real numbers, e.g. by the inverse of his/her reaction time RT. The time development of probands LAT has usually very variable character. In an ideal case, when only the factor of length of his/her operation service can be taken into account it has the form, sketched in Fig. 5.
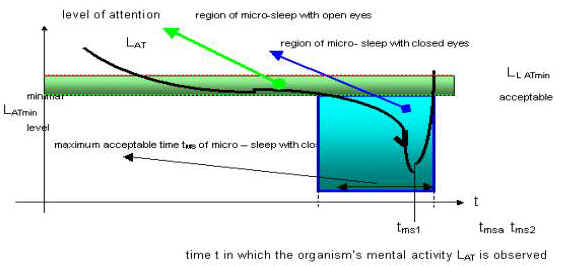
Fig. 5: The typical shape of probands level of attention when no other factors besides the length of service are considered.
In the region of shallow attention decrease the probands reaction time is usually significantly prolonged (often 3 to 5 time). In addition to this the angle, in which he/she is able to react in adequate manner on visual stimuli is significantly narrowed and the probability of his/her false reaction in much higher. More over, some probands can stay in such stage for considerably long time. They are still able to operate the respective system in principle, but the probability that they operate it in safe manner is very lowered.
Actually, they operate it in dangerous form.
When the particular proband is so lucky and causes no accident in the course of his/her system operation during the region of shallow attention decrease, he falls into the second region, where the level of his/her attention falls suddenly to zero. His/her eyes close and he starts the period of deep micro-sleep. Here his/her ability to control and operate the respective system well is reduced almost to zero.
Nevertheless, there is known, that some skilled professional truck drivers can drive also being in this region - of course their abilities to control the car are reduced to some small set of basic functions, like to keep the car in straight direction and to keep the constant speed. They relax for short time on such pieces of highways, which they know well as straight and quiet. Problems appear, when some unexpected situation happens - usually with result of heavy accident, because they do not react adequate.
In real situation, such ideal time-dependence of attention reduction in the course of long operator service appears only exceptionally. The particular operator attention decreases for some time. After that, it can be provoked by some alarming stimulus or situation. This is followed by another decrease, and so long.
However, after several repetitions of such cycles, the sensitivity of the tired operator to provocative stimuli appears to be much lower and his/her average level of attention it falls down definitely (see Fig. 6).
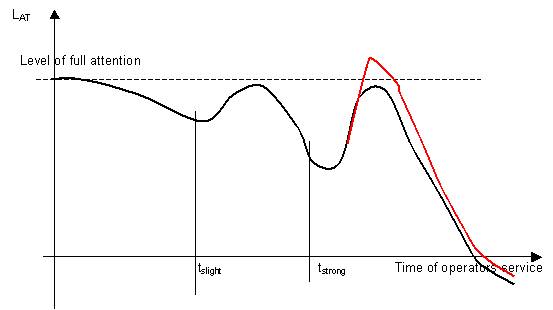
Fig. 6. To the temporary improvements of operators attention level
Till known, no on-board applicable method for direct measurement of the human subject reaction time RT is known. Almost all direct methods are based on measurement of the time interval, which appears between the time of stimulus appearance and the time of human subject final reaction (inclusive the time of his/her particular effector function).
Such methods of measurement are considerably well realizable in laboratory. In on-board praxis, such provocation is usually unwanted because it can have negative influence on human operator. Therefore, for practical purposes the indirect methods of actual values of RT estimation are to be developed.
For this purpose one has to find a set of suitable, on-board measurable parameters which can be used for identification of the attention decrease and of onset of the micro-sleep.
Among such parameters belong:
- the electro-magnetic activity of brain,
- frequency of breath,
- frequency of hearth beats,
- eye movements,
- skin resistance,
- face grimaces etc.
All these parameters have some advantages and also disadvantages.
We have chosen the EEG activity as the dominant significant parameter for our investigations.
The reason is that this is probably the only one source of data, from which the almost immediate and reliable information about the brain function can be mined.
After mining information from many EEG time-series recorded on several tenths of human subjects in our laboratory we can analyze the procedure of the respective operator vigilance decrease and attention degradation almost immediately and with quite acceptable reliability.
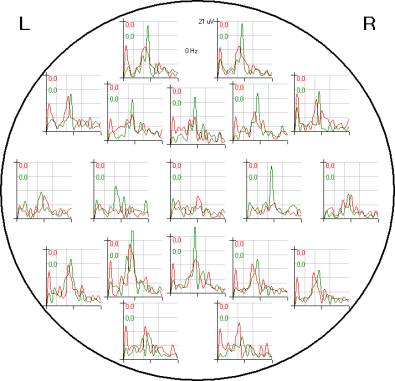
As basis for such information mining we have used certain relations, which can be found among some components of EEG spectra. Here one has of course to take into account that the EEG time-series are of the quasi-periodical and quasi-stationary character in principle.

Fig. 7: Example of EEG time series.
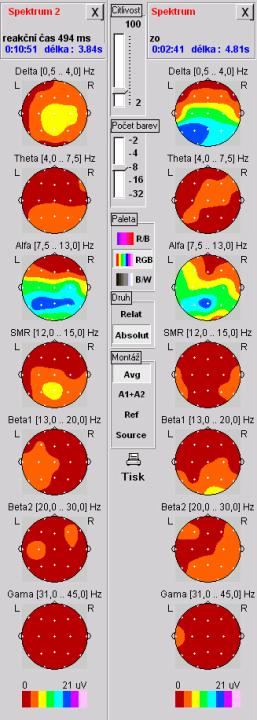
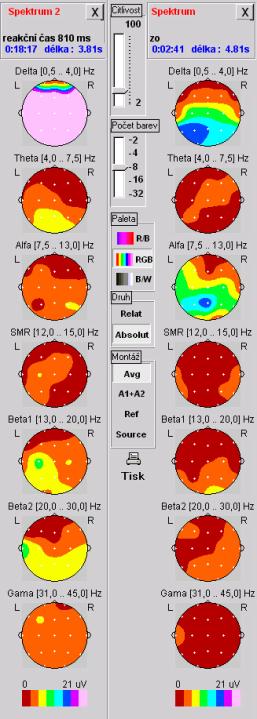
Due the quasi-periodical and non-stationary character of these time series the standard methods of spectral analysis are of limited use here only. We have applied a Gabor filtration based on the use of polynomial filter of the 50 degree considerably successfully. Example of resulting spectra is presented in Fig 8.
 |
 |
Fig.8b: Rail-road driver in relaxation stage, RT = 810 ms.
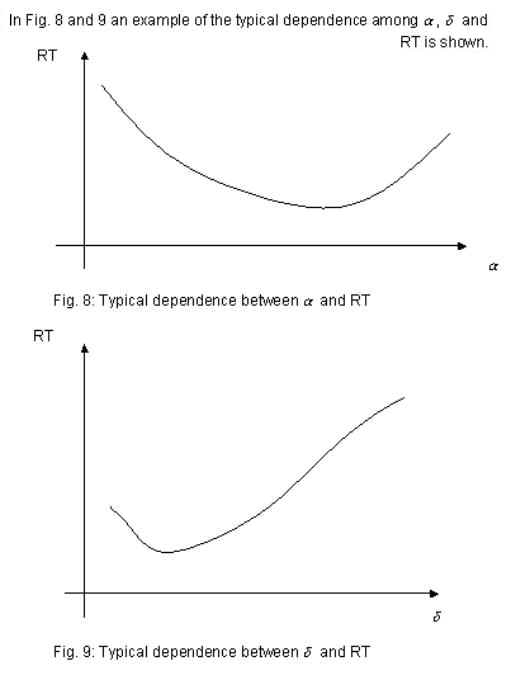
The careful analyses of many such results allowed us to find such dependence like that shown schematically in Fig. 9

Fig. 9: Example of dependence among dominant amplitudes of two Gabor spectral lines and and reaction time RT.
Such dependence are of very individual character and differ for each proband, but seems to not change for long time of his life.
Beside this we search for much sharper analytical tool, by the use of which we can mine from the EEG time-series the information on the actual level of probands attention. One of my graduate students, Ing. Petr Svoboda has tried to use for this purpose:
analysis of the poles and zeros locations of Z-transfors of some approximations of selected time-series windows,
analysis of time development of some parameters of differential equations describing the respective time-series.
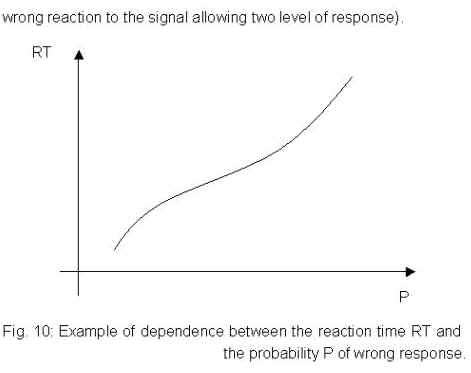
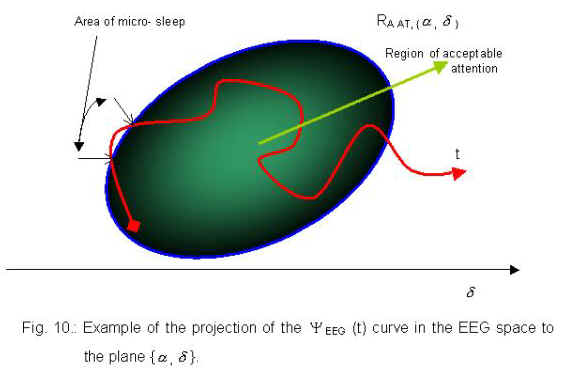
Example of his results, which I consider as very interesting is shown in Fig. 10 and 11.

Fig. 10a:
Fig. 10b:

Fig.11:
Having so some information about the particular proband attention behavior, we can construct a set of suitable attention predictors, which give us the information about the expected development of the particular operator attention in the course of his/her service.
Such predictors are to be individually adjusted to each operator under consideration. We expect that these predictors can work with acceptable prediction reliability (about 90%) for the prediction horizon about 2 - 3 minutes.
We hope that on the base of this knowledge, in the course of further research the development of on board-applicable measuring set will be possible. By the use of this we hope to be able to worn the system operator and eventually also his/her supervisor, that the particular subject is losing his/her attention and starts to operate the respective system dangerously.
1. Problems of tools and methods for system reliability and safety improvement
As a system we have considered any such organized set of physical, chemical, biological, social or information components and building blocks, which is able to realize some or more reasonable functions.
We have already mentioned also the main characteristic of system
- the set of system functions F,
- the vector of system parameters X,
- the system structure St and
- the vector of independent variables P.
We have mentioned also already, that in the space {X}of system parameters X all the points, corresponding to reliable and safe operating systems are in certain its part, called the region o acceptability RA.
The analysis of RA represents very important, but usually quite laborious problem, for the solution of which many methods were developed. Though the set of these methods is still not closed and a lot of very interesting questions can be solved here, for the purpose of this presentation let us suppose, that we know how to analyze the region of acceptability in the case of some particular system.
Let us suppose further, that we deal with so called well designed systems only. I.e. with such systems, which work well at least of the beginning of their use or of their observation.
One can formulate therefore the following theorem:
Each real system, when exposed to the influence of a set of independent variables P (before all of the time P = pt), can be represented by some position of the vector X in the parameter space, moving along certain life-curve . For t ® A, the life-curve breaks at least once the boundaries of RA. This situation represents the Fig. 12
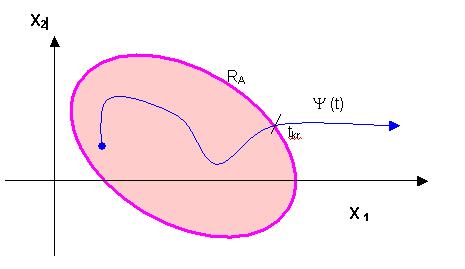
Fig. 12: Life-curve intersecting the boundaries of the region of acceptability
The reliability H of some system is represented as the probability that for certain time interval t0L t L tkr (or some interval of other independent variable influencing the system under consideration) the values of the respective system functions F do not differ from the requested values F* more than the acceptable limit DF.
(D1)
The reliability H of some system is represented also as as the probability that for certain time interval t0 L t L tkr (or some interval of other independent variable influencing the system under consideration) the respective life-curve Y(t) will remain inside the region of acceptability RA
(D1a)
Safety of the system is to be considered as the probability that it will be resistant against the disturbing influences. (D2)
The problems of system reliability and safety are of very broad nature and for their solution one has to use knowledge from wide set of disciplines, before concerning the:
* general system theory,
* theory of system sensitivity,
* theory of tolerances of system parameters,
* methods of time-series prediction,
* methods of system diagnostic,
* progressive information technologies, especially the theory and applications of artificial neural networks,
* theory and methods of man-system interactions,
* theory and methods of system restitution,
* safety systems,
* legal aspects,
* social aspects
* safety recommendations and norms.
The problems of system reliability and safety can be solved from 4 following main aspects:
* Design and construction of new system so that its reliability and safety will be as high as possible
* Analysis of reliability and safety values of the already existing system
* Reliability and safety of interaction between the existing system and human operator or users
* Formulation of recommendation and norms for design, production and operation of reliable and safe systems.
The reliability and safety of artificial systems was in the course of human history ensured by various approaches. As most significant the following four can be considered:
* The use of satisfactory robust system components
* The duplication and eventually multiplication of important parts of the system or eventually of the system as whole
Modification of the system structure so that the values of its system function sensitivities to parameter changes or to independent variables can be minimized
* Application of the principles of predictive diagnostics so that one can expect when eventually the trajectory of the respective system life-curve approaches to the boundaries of the region of acceptability and warn in advance the system supervisor and/or user. In certain cases this principle can be also used for in-line corrections of the values of some critical system parameters so that the trajectory of its life-curve is detoured inside the region of acceptability.
Quite often all these approaches are combined. Nevertheless the application of predictive diagnostics can be considered as the up to now most sophisticated tool for system reliability and safety improvement. For its successful application we need to have at disposal satisfactory knowledge about:
* The kind of dependence of the system parameters X on independent variables P,
* The shape of the region of acceptability RA * The sensitivity SFX of the system functions F on changes of system parameters X
* The sensitivity SFP of the system functions F on independent variables P
* The shape of the trajectory (P), resp. (t) of system life-curve, especially in the vicinity of RA boundaries
* The prediction tools for estimation of the (P), resp. (t) shape behind the instant of its actual observation.
By the use of such knowledge one can construct the apparatus for either the on-time warning or eventual also for on-line corrections, operating principially according the following scheme:
1.The shape of RA and (t) (till the time tobs) is investigated - in Fig.13 the sketch is shown for three-dimensional case N=3 only
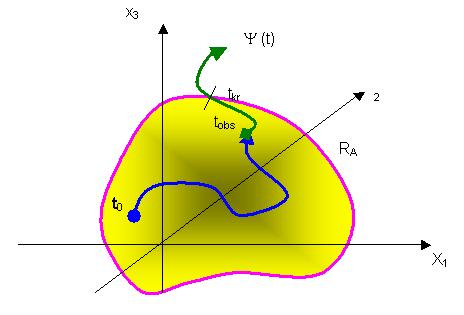
Fig. 13: To prediction of the critical time tkr
2. If t tkr the warning system is initiated. The principal scheme of such a warning system for micro-sleeps is shown in Fig 14.
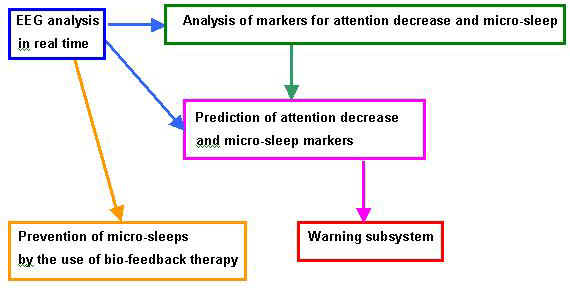
Fig. 14: Scheme of micro-sleep warning system. The yellow line represents the way for eventual prevention.
1. In certain cases some of the set N of the system parameters xi are corrected so that the trajectory (t) of the system life-curve returns satisfactory deep inside the RA, see Fig. 15.
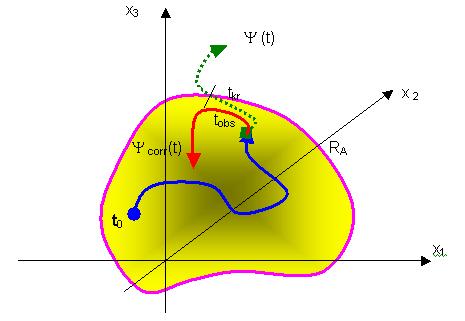
Fig. 15: Correction of Y (t)
However, as far as we know, the prolongation of the system life-time, which one can reach in this manner is from the temporary character only - unfortunately finally each real systems life-curve must leave the respective region of acceptability without hope of return.
Author
Name: Doc. Ing. Mirko Novák, DrSc
Institution: Czech Technical University, Prague
Faculty of Transportation Sciences
Address: Konviktská 20, 11000 Prague 1
E-mail: mirko@fd.cvut.cz,
Fax: 004202 24221721/416
Phone: 004202 24221721/418
004206 02242870 mobile
4. References:
[1]…Mišovic M., Malý V.: Reliability of Information Systems, CATE, Brno, 1993
[2]…Blackmore S.: The power of memes, Scientific American, Vol. 283, October 2000, No. 4, 52-63
[3]…Dawkins R.: The selfish gene, Oxford University Press, 1976, 1989
[4]…Blackmore S.: The meme machine, Oxford University Press, 1999
[5]…Dotlacil M., Kopriva P.: Networks Reliability Workshop 99, CTU, Prague, 1999, 41, 42
[6]... Nilsson T., Nelson T.M., Carlson D.: Development of fatigue symptoms during simulated driving
Accid Anal Prev , 1997 July, 29(4), p. 479-488
[7]... Marottoli R.A., Richardson E.D., Stowe M.H., Miller E.G., Brass L.M., Cooney L.M. Jr, Tinetti M.E.: Development of a test battery to identify older drivers at risk for self-reported adverse driving events
J. Am. Geriatr. Soc.,1998 May, 46(5), p. 562-568
[8]... Arnold P.K., Hartley L.R., Corry A., Hochstadt D., Penna F., Feyer A.M.: Hours of work, and perceptions of fatigue among truck drivers
Accid, Anal, Prev, 1997 July, 29 (4), p.471-477
[9]… Novák M.: Theory of System Tolerances (in Czech), Academia, Prague, 1987



How the EEG signals can be measured ?
Thalamo - cortical oscillation consists of extremly complicated concert of very many almost parallel paths of electrical impulses travelling in membranes of axons connecting cortical and thalamic neurons.
These impulses have the potential of about 70 mV. However the resulting electromagnetic fiels is projected on the head surface with voltages about 10 - 30 mV only.
These electric waves are of quasi-periodical and quasi-stationary character and its main spectral components appears in the range from 1 to 30 Hz.


 |
 |
 |

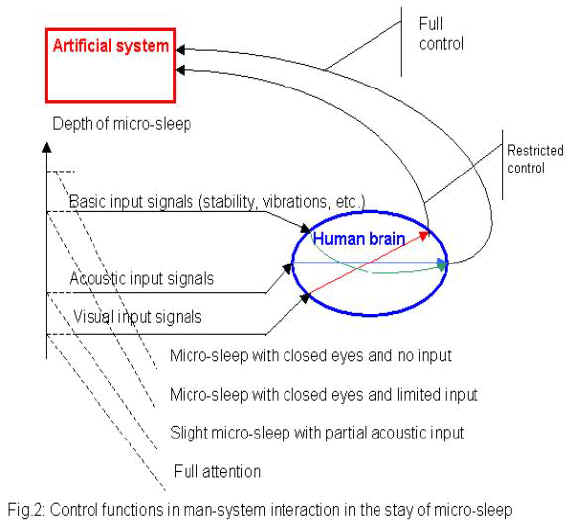
How the micro-sleep can be detected?
By measuring of some significant human operator parameters (so called "markers"), e.g. breath temperature, eye movement, electro-cardiographic signals etc.
Among them the electroencephalographic (EEG) signals are most iportant.
Why?
EEG signals are the only marker which is immediately, primary producted my the brain activity influencing vigility and sleep. All other markers concern the secondary factors.
EEG signals are produced immediately by thalamo-cortical oscillations in brain structure.
