Reliability of man-system interaction and theory of neural networks operations
Prof. Ing. Votruba Zdeněk
Presented at the conference:
Limitations and Future Trends in Neural Computing,
Siena, Italy, October 22-24, 2001, Italy
*) Prof. Dr. Mirko Novák,
**)Prof. Zdenek Votruba,
Laboratory of System Reliability
Department of Control Engineering and Telematics
Faculty of Transportation Sciences
Czech Technical University, Prague
11000 Prague 1, Konviktská 20
e-mail: mirko@fd.cvut.cz
phone: 004202 2435 9548, 004206 0224 2870
Abstract
This talk concerns the problem of the reliability of interactions in complicated artificial systems involving the combination of artificial- and human- based functional blocks.
Such composed systems are typical for many applications in present human society, appearing in science, industry, business, finance, medical care, transportation, defense etc.
Though the significance of such systems is still higher, because they deal with still larger amount of power, money and size of information and have the influence on still higher part of human population,
the failures of their operation causes very serious problems and quite often is of really catastrophic character.
Therefore, the requirements on their operation reliability and safety are of extraordinary importance.
All such systems are of the heterogeneous nature considered from the structural point of view.
Of course, their functions F cannot be heterogeneous, i.e. they cannot involve significant chaotic components. More over, the function F of each artificial system, which has to have a real practical importance, must be oriented to realization of certain aims.
The function F of each such system therefore needs to be homogenized as much as possible in such a manner, that all the non-required function components have to be damped and if possible, fully removed.
Though it can sound as contradiction, we speak about the homogenization of the heterogeneous system.
Of course, the system remains heterogeneous from the structural point of view, but it function activity is required to be homogeneous. Usually, this requirement can be represented in formulation of the maximal allowed deviation F of the respective system function value F from the required value F0.
Some discussion of related problems is carried out later.
From structural point of view, each heterogeneous system is composed of the set of M various functional blocks FBm, m = 1,…M.
These are of two main kinds:
- artificial functional blocks FBa m,
- human-based functional blocks FBh m.
The basic analysis of possible sources and reasons of operation faults of heterogeneous systems tells us that these can be of the following main categories:
a) the faults of the functional blocks FBa m which are of the artificial nature,
b) the faults of the human-based functional blocks FBh m,
c) the faults in the interaction among the blocks of the type a) and b).
All these three main categories of operation faults are worth for deeper discussion, because in all of them the improvement of reliability and safety can be expected.
The faults of operation of artificial, namely technical functional blocks used in heterogeneous systems are in the focus of interest of many researchers already for many years.
Though the operation safety and reliability of many such functional blocks was improved in recent years quite a lot, still much can be done in this respect.
Without neglecting the significance of classical approaches based on
- improvement of component quality, technological level and
- structure modification as concerns the spare paths and sensitivity minimization, a further improvement can be reached in some cases by application of nonstandard system structures.
Among them the artificial neural networks are to be mentioned before all.
Another approach leading to significant improvement of system reliability and operation safety can be based on application of the method of predictive diagnostics.
As concerns the human-based functional blocks, the interest has to be given not only to selection of suitable human operators (and often also the human users), which are able to control the still more complicated systems, but also to their training.
This training has to be oriented not only to mastering of dealing with the respective system and its controlling, but also to improving human subject resistance to the decrease of attention and vigilance.
Very important is also the development of warning systems against the eventual miss-function of the human component operating in heterogeneous system.
In this place the systems for detection and prediction of the so-called micro-sleeps are to be mentioned especially.
Nevertheless that such problems are of very high importance and that our Laboratory is quire active in this area, we have no place to discuss the details here.
In this talk we concentrate on two kinds of reliability problems only:
* One can be seen around the third above-mentioned source of system operation faults, which is in non satisfactory reliability and safety of interaction between the artificial and human-based system functional blocks.
We shall discuss before all the translation procedures, which are necessary for reliable and safe exchange of information among such functional blocks of different nature.
The concept of translation-ability is introduced with regard to reliability and safety of translation operations realized in particular system.
The main kinds of possible sources of translation faults are discussed and some non-conventional ways for translation reliability improvement are proposed.
* Finally, we focus our attention on problems, connected with the operation reliability of artificial neural networks, considered as special kind of artificial heterogeneous systems.
1. Introduction - the system structure
From the structural point of view, the heterogeneous systems can be of very different character. However, almost all of them (even not really the all) involve some typical parts, schematically shown in Fig. 1.
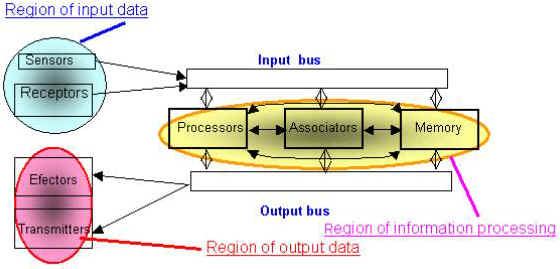
Fig. 1: Typical basic part of the system structure, appearing in many heterogeneous systems
Some parts mentioned in Fig.1 are specialized for handling with information I only.
Some other, namely processors, efectors and transmitters can handle also the mass M or energy E.
These parts, which are specialized for dealing with information I form the information subsystem of the respective heterogeneous system.
Any information subsystem consists of three main regions:
* region of input data,
* region of information processing and
* region of output data.
Between the region of input data the input bus serves as the necessary interface similar as the output bus serves as interface between the region of information processing and the region of output data.
The existence of the information subsystem can be considered as the necessary (probably not as the sufficient) condition for the operation ability of any real heterogeneous system.
By another word:
It is hard to imagine any real heterogeneous system, operating reliable and safe without proper activity of its own information subsystem.
More over:
The quality of operation of information subsystem and its power determines (and limits) the quality of operation of the heterogeneous system under consideration as a whole.
In any complex heterogeneous system its own information subsystem represents therefore a part of special importance.
One can postulate, that the reliability and safety of each system operation is proportional to the reliability and safety of its own information subsystem.
Therefore, in general, the information subsystems are recognized at present as still more important object, which use is extremely important for all the aspects of the life of human society.
The axiom can be formulated:
Each system, natural or artificial, without respect to its physical nature, must involve and use its own information subsystem (or at least to share the use of activity of the information subsystem belonging to some other system).
Without proper function of such information subsystem any system cannot operate well, or even more, it cannot operate at all.
2. Reliability of artificial information systems
Let therefore artificial information systems here be considered only (however, certain from the further presented ideas can be applied also on natural [living] information systems).
Suppose that the information system under consideration realizes a set F = {Fk} , k - 1…K of system functions. These functions can be considered as the ratios among certain information I acting with the respective system. Of course, not all the partial system functions Fk of such an information system are of the same importance.
Therefore, the importance of each Fk can be measured by some value of importance merit IMk = <0,1>. After the estimation of the values of IMk is made, one can focus on the most significant of them.
Suppose further, that the set F depends on: * the structure St of the information system,
* the vector X of N system parameters xi, n = 1…N
* the vector P of J independent variables pj, j = 1…J
For the purpose of this study, the further assumption can be made because of simplicity:
a) the structure St of the system does not change with independent variables;
b) all the system parameters xi can be expressed by real numbers;
c) from all possible independent variables pj the time pj = t is considered as most important, because for any real system it acts as the only absolute uninfluenced independent variable.
This assumption is very often fulfilled with high accuracy. Nevertheless, if not, the respective modification of the further observations can be made without problems.
Each system, not only the information one, consists of certain number (often quite large) of particular functional blocks (further also FB only), realizing the partial system functions and interacting mutually. The existence of amorphous system involving no FB can appear exceptionally only. Among particular FBs in certain system the exchange of information is performed.
The structure St of mutual interaction among FBs can be fixed or can develop in the course of system operation (this is typical not only for living systems, but can be realized and successfully applied also in many sophisticated artificial systems).
Among the all the mentioned main kinds of functional blocks: receptors, processor, associators, memory, effectors and transmitters, various feed-forward and feed-back interactions exist.
Because many of these basic functional blocks can in real information system appear to be operating in parallel, these interactions exist also among the individual functional blocks of all the mentioned kinds and the structure St of real information system can be therefore very often much more complicated.
3. Interfaces and synapses
When dealing with any heterogeneous system of the special importance are the interfaces (synapses1) - this term is transposed from neurology and is now quite frequent in the theory of neural networks), which ensure the proper and in-time translation if information exchanged among such various functional blocks.
Suppose the interaction between two functional blocks FBj and FBk arranged so that the block FBj supplies the output information Ij out, which is transmitted to the block FBk as its input information Ik in. Such a procedure is performed by the use of two interaction supporting media, the interface If and the transmission path Tp.
The transmission path realizes the transmission of Ij out to the input of the FBk and we usually require that the respective transmission function Tpj-k approaches 1 as much as possible.
The output information Ij out from the functional block FBj is formed on the base of some alphabet ABj and with some grammar Gj. However, the functional block FBk can able to understand the received information, only if it is written in its own alphabet ABk and grammar Gk. This is quite frequent case.
If therefore the full understanding of the message transmitted from the functional block FBj to the functional block FBk is to be ensured, somewhere along the transmission path between FBj and FBk, the translation Tr of the message written in ABj and Gj into the message written in ABk and Gk has to be realized (see [3,4,5,6] e.g.).
This translation Tr can be provided either in only one location of the respective signal path or it also can be distributed along it in several places. In the later case, the individual translation functions can be realized simultaneously or subsequently.
1) Synapses can be considered as special kind of functional blocks allowing proper interaction among other FB´s.
Usually, the first mentioned approach is much more common. Translation Tr is provided in the interface IF, which acts between two or more interacting FB´s. This can be in the case of one directional interface, e.g..
The function of IF has different character, if it ensures the necessary translation in the case when the interaction between both interacting blocks is bi-directional.
In certain cases (especially in biological systems) the IF can be split into two parts, divided by shallow gap (cleft), bridged by special short transmission path.
In complicated heterogeneous systems interfaces can perform the necessary information translation also among more than only two mutually interacting FBs (such situation can be found quite often when analyzing the biological information systems, which are typically of very complicated heterogeneous nature).
The capability of certain information path in heterogeneous system to realize the requested information translation is called the translation-ability. This means that among all the considered interacting functional blocks the respective signal transmission paths must exist, in which the respective interfaces ensured the necessary information translations.
Such a translation Tr must of course be realized with appropriate accuracy, reliability, safety and in requested time. Formulation of requirements on translation-ability (and inclusive on the respective interface function) belongs to one of most important problems in heterogeneous system design.
In complicated systems also the mutual synchronization of function of all the interacting interfaces needs a special attention.
Let now turn the attention to the process of system functional homogenization (more detail discussion can be found e.g. in [5]).
Information is the most important entity in this process. The result is obvious - decisive role of language. Respective languages of the parts of the whole differ in theirs alphabets, grammars and semantics. Consequently, multilingual character of information exchange between individual functional blocks of the system, and object / environment respectively, arises [4,16,17,20,30].
Four basic classes of grammars should be recognized in this context: (classes C and D are often referred as soft grammars)
A: vocabulary-oriented grammars (assorting of language. constructs)
B: Chomski grammars (generation - rules)
C: grammars of similarity (analysis of semantic similarity)
D: grammars of representation (comparison of process similarity and goals equivalence)
The quality of multilingual translation is the natural measure of the degree of homogenization. Integrity of the system is causally derived from the completeness or in some case completeness and efficiency, of translation.
Within the frame of system engineering, multilingual translation tasks [4,20,23,30,31] fit quite well to tackle this problem. Unfortunately, these tasks are at the very beginning of their study, understanding and implementation.
An important aspect of the multilingual translation ability is: the utilizing of limited resources and / or limited time to disposal.
Criterion of the effectivity should be the "Dynamics of the identity evolution" of the respective whole.
The homogenization of certain objects can be identified on more then one level, or their heterogeneity is of multi - dimensional nature.
That is the reason why there is a common need for universal means of homogenization processes recording. We argue that the strong requirement of universality could be met by the general introduction of the concepts of object language translation in multi - lingual environment.
System theory and system engineering tools, even on the existing state-of the art level, offer concepts and approaches that are suitable for solving the tasks of homogenization of complex heterogeneous (hybrid) systems. These approaches should supplement or replace till this time prevailing attempts, based on intuition and experience.
Homogenization via multilingual translation has been presented in [14] as the approach with the highest degree of universality. To enable the utilization of this approach the concept of pragmatic language (see [31] e.g.) should be introduced.
The language of the real object is pragmatic one if (and only if) it can be pragmatically translated into the language of identity of the respective object in both directions. Pragmatic translation is the translation that is acceptably degraded, or it is joined with acceptable degradation of resources.
4. Heterogeneous systems interfaces reliability, safety and security
From the previous consideration it is evident that in all systems the problem of appropriate translation function Tr of all the respective interfaces is of top interest. When formulating the requirements on such translation function of the particular interface, one has to take into account the aspects of reliability, safety and security of the respective procedure.
All these three aspect are of an extraordinary importance and all have to be considered from the probabilistic and fuzzy point of view.
By the term reliability we understand here the probability, that the respective system function, in this case the particular translation will be realized in certain limits on its quality.
By safety we understand the probability that the realization of the respective system function (i.e. the respective translation) does not have negative influence2) on realization of other functions of the system under consideration, or in general on other systems (including the human beings) existing in the environment 3).
By security we understand the probability that the content of translated information will not be open to any other information procedure4).
2) The requirement of "no negative influence" sound well, but in practice we almost ever have to accept the fact that there will be some negative influences of any realized system functions on something else. The reasonable specification of acceptable limits of such negative influence belongs to one of very important parts of the "art of system design".
3) A wide and interesting discussion can be held as concerns the acceptable size of the environment, which has to be considered and also about its content. In extreme idealized approach in this environment the whole Universe can be considered, however for practical problems one has to restrict its size and content.
4) This requirement needs to be considered in the course of time. In practice, after some time the requirements on translation security are significantly lowered.
The aspect of translation reliability requires before all that we need to determine:
* The maximal acceptable error in translation function of the interface under consideration,
* The instant in which the particular translation has to be realized in the course of the concert of all the mutual interacting interfaces activity,
* The maximal acceptable delay between acceptance of the information submitted for translation into the particular interface and its transmitting in proper translated form into the respective interacting functional block,
* The difference among the alphabets and grammars of the respective translated information.
As concerns the first mentioned need, the analysis of the system function sensitivity to the particular translation error has to be taken into account. It is evident, that in complicated hybrid system the significance of correct and accurate translation in certain its parts can be higher.
As concerns the second mentioned need, here one has to take into account that not all the translations realized in the system under consideration are often realized subsequently.
Some partial translations can start in the same instant, especially if the parallel information processing is practiced in the particular case. All the partial information translation procedures have therefore be done in certain specific schedule, forming the whole "translation concert", which optimal composition requires a very deep analysis.
As concerns the third mentioned need, one has to take into account that all the respective partial information translation are realized in real time and that they require some time.
If in the " translation concert" under consideration requires subsequent translation processing, the condition that in proper instants all the input information have to be at disposal needs to be considered.
As concerns the fourth mentioned need, we have to take into account that the length of the partial information translation and its sensitivity to translation errors is in general proportional to the difference between the input and output alphabet and grammar. Also the fuzziness of the input information has to be taken into account.
The aspect of translation safety requires before all that we need to determine: * The sensitivity of other system function of the system under consideration on the particular translation procedure,
* The effect of the particular information translation and its further dissemination on other systems (including the human beings) existing in the environment,
* The effect of distortion of the particular information translation on other systems (including the human beings) existing in the environment.
As concerns the first mentioned need, not all from the whole set of information translation realized in the course of certain system operation have the same influence to other signal and information processing in general. Some of them influence the other translations more, some less. The analysis of the values of sensitivity SFktr i, where Fk is the system function under consideration and Tri is the particular translation is therefore of great importance.
The knowledge of the values SFktr i allow to determine, which translations have to be done with much more care. For the purpose of such an analysis a good part of the apparatus of the general sensitivity theory can be used, however some modifications will be suitable. These problems cannot be discussed here in detail unfortunately.
The knowledge of these sensitivities could be also used as starting point to solution of the problem if and in which manner the procedure of particular translation influence the activity of systems, existing and operating in the environment.
Similar approach can be used when solving the problem of maximal acceptable level of distortion Tr of particular information translation with respect to the correct activity of other systems (or humans) in the environment.
Let us assume that the translation Tr itself depends on the set XIF of NIF interface parameters xIFi, i = 1,…NIF and on the vector P of J independent variables pj, j = 1,…J,
Tr = Tr(XIF,P) = Iout/Iin,
where Tr represents the respective translation function realized in the interface under consideration and Iout and Iin are the output and input information processed in it.
Suppose further for simplicity that:
? The respective signal transmission acting between the functional blacks FBj and FBk is ideal, i.e. that Tpj-k =1 and
? From all the eventual independent variables pj, which can have the influence on the particular interface acting between FBj and FBk only the time p = t is considered as the most important.
Let now the interface parameter space XIF be considered. The actual state of the vector of translation function Tr is in this space represented by a point, which in the course of time moves along certain trajectory , see the idealized Fig. 2 (sketched for the case NIF = 3 only.
Fig. 2: The idealized trajectory in the interface parameter space of the translation vector Tr in the course of time p = t.
Here the point Trt0 represents the initial value of translation function Tr, which suppose has acceptable function and therefore is inside the region RA Tr which represents the so called region of acceptability.
However due the influence of the independent variable p = t the value of Tr changes. If the respective vector Tr(tk) is still inside RA Tr (green case), the respective translation can be considered as acceptable for the understanding of the functional block FBk to the information transmitted form the FBj.
However, when the values of Tr (t) crosses the boundaries of RA Tr (red case), the FBk does not understand to what FBj send. The system starts to fail its operation in such a case.
The problem remains, how to determine the boundaries of RA Tr, and therefore also the maximal allowable deviation Tr j-k of the translation of I jout into Ikin. In many cases the value of Tr j-k is significantly content dependent and varies with I jout.
In such cases the necessity of so called intelligent interfaces, which can modify their translation function according the content and the quality (level of distortion) of incoming information is evident.
The aspect of translation security requires before all that we need to determine: * The maximal acceptable level of parasitic interactions among all the (non-functionally) interacting interfaces,
* The time-dependence of requirements on translation security and the course of their subsequent decrease
The first mentioned need concerns the problem which part of information and energy can be spread around the interface realizing particular translation so that the security of the respective information procedure does not decrease under certain specified limit.
Of course, the requirements on translation security do not remain still the same during the history of particular system activity. Usually, they decrease in the course of time. Some secret information can be opened for broader distribution after some time.
As we have already mentioned, almost all the information procedures, and also the translations cannot be realized absolutely perfect.
In any case we must accept the possibility that certain amount of errors and mistakes appear, which diminish the information content of the translated message and lower the probability that the receiving functional block will understand well the content of message.
The faults appearing in the procedure of translation can be classified according to their significance for lowering this probability.
Before we try to start with classification of faults, we must take into account that there exist certain thresholds, below which the influence of translation faults can be neglected.
This is due the ability of some interfaces to restore and reconstruct in certain manner the content of the translated information. Also some receiving functional blocks have the ability to accept and understand well certain information even if it is distorted.
The dependence of the probability of well understanding the translated information on the scale and frequency of faults is therefore significantly nonlinear.
Let us propose to distinguish following main categories of the influence on the probability of the understanding to the translated information: ? Negligible faults, which do not have any observable influence on the probability of understanding the translated information,
? Slight faults, which have observable but neglect-able influence on the probability of understanding the translated information,
? Serious faults, which have non neglect-able influence on the probability of understanding the translated information, and/or significant demands on system resources (energy/time),
? Fatal faults, which causes the incapability of information translation at all.
More over, some information appearing at the outputs of certain functional blocks can be of fuzzy nature and its subsequent translation results therefore again in fuzzy statement.
For the safe procedure of information transmission, the improvement of translation reliability and safety is of great importance.
In general, there are the following main approaches how to improve the translation reliability: * To realize the respective translation in more parallel paths comparing the results of particular translations and taking as correct that, which appears in majority.
* To insert in the respective translation some hidden implicit code for translation reliability testing. This code cannot have, of course, any influence on the content of translated information.
* To analyze the acceptable limits of possible information distortion in the course of translation and to predict the probability by which the particular translation approached these limits.
Extension of the last approach can be based on the basis of predictive diagnostics (see [1,2,9,11] e.g.) where one estimates the subsequently appearing distortions in the course of the translation procedure and corrects respectively its further steps. This is of special importance in the case of interactions in heterogeneous systems where the technical functional blocks interact with human subjects (see [7,8] e.g.).
No of these approaches is optimal, in general. They are therefore often combined. Doing this one has of course to take into account the requirements on translation speed, limits on translation cost, energy requirements etc.
For further research a very vast area opens here.
5. Reliability of artificial neural networks
Artificial neural networks as they are used today in many interesting and important applications represent only a very rough approximation of simplest information systems of living bodies.
The reason is not only in the Mc Culloch - Pitts model of neuron, which is still dominantly used (probably because of its ingenious simplicity), but also in neglecting many auxiliary functions, which exist in natural neural networks helping to stabilize their function ability and therefore to improve their reliability.
As result, the function reliability of artificial neural networks is naturally limited and serious attention has to be given to its improvement.
Analyzing the sources of possible faults in artificial neural networks operation, we can find the following factors as very significant: A) High sensitivity of realized network functions to the changes of some parameters,
B) High redundancy of some artificial neural networks,
C) Non sufficient accuracy of adjusted values of some physically realized network parameters and their small time - and/or environmental stability,
D) Uncertainty of the artificial neural network actual training level.
As concerns the aspect A), some artificial neural network functions appear to be very sensitive to the change of network parameters, both of the network structure and of the used models of neurons.
Therefore the analysis of these sensitivities is of great importance, especially in the case, when the particular artificial neural network is proposed for long time service or is applied in some critical point of artificial technical system.
However, such an analysis requires a lot of computations, especially in the case of network composed of higher number of neurons.
According to our experience, there are some places in artificial network structure, where one can expect higher values of these sensitivities.
While in conventional linear electrical networks the theorem on sensitivity invariance is known to hold, saying that some weighted sum of network transfer function sensitivities is constant, nothing similar was proven up to now for artificial neural networks.
Nevertheless, also here the practical experience tells us, that by insertion of redundant network components the sensitivity of realized network function sensitivity to changes of network parameters can be diminished - at least in certain cases.
On the contrary, some classes of very complicated artificial neural network structures can be very sensitive. The explanation of this fact can be seen in uncertainty of the particular network position in the training space (m).
By this term we mean the multidimensional space of all the particular network parameters wi, i.e. the parameters of the respective network structure and also of models of all the used neurons, scaled by the sequence of training steps m (see Fig. 3).
In the set of parameters wi not only the synaptic weights acting among all neurons are to be involved, but also the parameters of individual neuron activation functions and their thresholds (suppose that the network structure does not change in the course of training).
The actual state of the artificial neural network training is represented by certain point in the space (m).
In the course of network training procedure this point moves along the training trajectory step by step from the initial position 0.
Suppose that this is already inside the space A of acceptable level of applied training-error criterion. The goal of the training procedure is to move the training vector near or inside the region opt of almost optimal training.
Quite theoretically, the opt should be considered as a point, usually the surface of the values of training error criterion inside A is so flat, that one has consider the nonzero dimensions of opt.
Fig. 3: The trajectory of the training vector in the training space(m).
Of course, the sketch shown in Fig. 3 is a highly idealized case only. Practically, both the shapes of A and opt could be quite complicated, each different from another and both often having two or more separate parts. This is one of reasons for the existence of the above-mentioned factor D).
If the training error criterion stops the training procedure when the vector enters inside opt, we have no other information about the inside of opt.
Suppose now, that as result of the sufficiently realized training procedure, the vector appears inside the region opt or at least in its close vicinity and that the respective network is able for to be used.
If in the course of the network operation any change in its parameter values appears, the vector moves from its trained position. However, because of the uncertainty of opt, there is hardly to say, whether the training stop condition will still be fulfilled.
One of perspective approached how to minimize such uncertainties is based on application of the principle of predictive diagnostics.
The basic idea of this principle is known from the theory of system reliability: One applies the suitable time-series prediction methods to estimate the further trajectory of the vector in the network parameter space W caused by the parameter values changes, and satisfactory in advance derives from it the necessary hints for network values corrections.
Of course, such a diagnostic and network repairing approach is applicable only if certain set of network parameter values can be corrected in the course of network operation.
If no, the network operation must be broken for the time of network corrections.
Such principle of predictive diagnostics is important especially, when the respective artificial neural network is realized in microelectronic technologies, where there are considerably high limitations on the obtainable accuracy of parameter values.
Of course, the design and practical realization of the respective sub-network ensuring the in time realization of the prediction and correction procedure can be very laborious and expensive task. Therefore, the careful economic calculation needs to be provided before.
6. References
[1] Novák M.: Predictive diagnostics as a tool for improvement of transport system reliability (in Czech). Research report LSS No. 36/98, Faculty of Transportation Sciences CTU Prague, 1998
[2] Novák M.: On reliability of prediction diagnostics (in Czech), Research report No. LSS- 20/97, Faculty of Transportation Sciences CTU Prague, 1997 [3] Novák M.: Theory of system tolerances, (in Czech), Academia, Prague, 1987
[4] Vlcek J.: Translation-ability as the principle of informatics. (in Czech), Seminary "Theoretical backgrounds of informatics", Faculty of Transportation Sciences CTU Prague, 1997
[5] Votruba Z.: Parts of Stonier model a its analogy in natural sciences, (in Czech), Seminary "Theoretical backgrounds of informatics", Faculty of Transportation Sciences, Prague, 1997
[6] Leso M., Votruba Z. : Reliability Estimator. Neural Network World. Vol. 9. 1999 No. 3, ISSN 1210-0552 [7] Novák M.: Neural Network Approach for Man-System Interaction Reliability, CSC-IMACS '98 , Pireus, Greece, October 26/28, 1998
[8] Faber J.: Associative Interneuronal biological Mechanisms, Neural Network World, Vol. 1, 1991, No. 1, 13-31,
[9] Novák M.: Theory of Reliable Systems Based on Tolerance Prediction, Dexa'93, Prague, Czech Republic, September 6-8, 1993
[10] Votruba Z., Moos P.: Information Power, "CE&I;" Technical University Košice, Herlany, Slovak Republic, October 1999, ISBN 80-88922-05-4
[11] Votruba Z., Novák M.: An Approach to the Analysis and Prediction of the Complex Heterogeneous Systems Evolution, Technical University Košice, Slovak Republic, October 2000
[12] Votruba Z.: Modeling of synaptic information function - proposal of the multilingual translation approach Neural Network World, vol. 11, 2001, No. 5,
[13] Votruba Z.: Parts of Stonier model and its analogy in natural sciences, (in Czech), Seminary "Theoretical backgrounds of informatics", Faculty of Transportation Sciences, Prague, 1997
[14] Votruba Z., Novák M.: An Approach to the Analysis and Prediction of the Complex Heterogeneous Systems Evolution, "CE&I;" Technical University Košice, Herl?any, Slovak Republic, October 2000
[15] Novák M. et al.: Artificial Neuron Nets (Umelé neuronové síte) (in Czech), C.H. Beck 1998 Praha, ISBN 80-7179-132-6
[16] Grmela A.: Neural Computing and Neural Science, Agces Publ., Prague, 1997, ISBN: 80 - 902329-0-6
[17] Votruba Z., Novák M.: On Homogenization of Heterogeneous Whole, Proc. CCSC Crete, July 2001
[18] Vlcek J.: System Engineering, ed. CVUT, Prague 1999. (in Czech)
[19] Stonier T.: Information and the Internal Structure of the Universe, Springer 1990
[20] Vlcek J., Brandejský T., Moos P., Novák M., Votruba Z.: Proceedings of Seminar of Theoretical Backgrounds of Informatics - Information Power, problem study, Prague 2000 (in Czech), Institute of automation in Traffic and Telecommunication CTU in Prague, Faculty of Transportation Sciences
[21] Brillouin L.: Science and Information Theory, Academic Press, New York, 1956
[22] Prigogine I., Stengers I.: Order Out of Chaos, Bantam Books, Toronto, 1984
[23] Klir G.J.: Facets of System Sciences, Plenum, New York, 1991
[24] Novák M., Votruba Z.: System Theory Approach to the Hybrid System Lifetime Analysis and Prediction, CCSC `99 Athens 1999
[25] Manthey M.: The Phase Web Paradigm, Int. J. General Systems, Vol. 27(1-3)
[26] Deutsch D.: The Fabric of Reality, Allen Lane Penguin Press, N. York 1997
[27] …Vlcek J. et at.: Reliability of Hybrid System, Research report No.: K614 - 01/2001 (in Czech) Institute of automation in Traffic and Telecommunication CTU in Prague, Faculty of Transportation Sciences
[28]… Votruba Z.: Chaos and the Language of Object Identity, Seminar of Theoretical Backgrounds of Informatics (in Czech), Institute of automation in Traffic and Telecommunication CTU in Prague, Faculty of Transportation Sciences 13.3.2001 (revision 10.4.2001)
[29]… Vlcek J., Votruba Z.: Hybrid Systems in Transportation, (in Czech) Proc. Conference AUTOS 2001, Prague
[30] …Vlcek J.: Homogenization / Translation- ability / Efficiency / Criteria, Seminar of Theoretical Backgrounds of Informatics (in Czech), Institute of Control and Telematics CTU in Prague, Faculty of Transportation Sciences, 2001
[31] …Vlcek J.: A Sketch of the Hybrid System Constructive Theory Structure, Seminar of Theoretical Backgrounds of Informatics (in Czech), Institute of Control and Telematics, CTU in Prague, Faculty of Transportation Sciences, June 2001
Authors
Names:
*) Prof Dr. Mirko Novák,
**) Prof. Zdenek Votruba,
Institution:
Czech Technical University, Prague
Faculty of Transportation Sciences
Address:
Konviktská 20, 11000 Prague 1
E-mail:
mirko@fd.cvut.cz, votruba@fd.cvut.cz
Fax:
004202 24221721/416
Phone:
004206 02242870, 004206 02346329